Translate this page into:
UAV operations: An analysis of incidents and accidents with human factors and crew resource management perspective
Abstract
There is evidently no mandatory Human Factors (HF) analysis during Court of Inquiry (CoI) in various incidents and accidents in Unmanned Aerial Vehicle (UAV) operations in India. Hence, human error as a causative or a contributory factor in the outcome of a situation leading to an accident was not commented upon. With this background, HF especially Crew Resource Management (CRM) issues in effective UAV operations were analysed with an aim to prevent similar accidents in future. A critical retrospective analysis of CoI in UAV incidents and accidents was undertaken. In the absence of a HF Specialist in UAV related CoI, there were no records of detailed analysis of HF. Hence, the HF were gleaned through from the available material. Between the years 2000 to 2004, there were five incidents and accidents in UAV operations. In most of the CoI, all the accidents pointed at Human Error (HE) of operators, either as a contributory factor or direct cause. The CoI were analysed to find a pattern of HE committed by the operators. Role of HF, especially CRM issues, in safe UAV operations and the future trends in UAV operations and related safety issues are discussed. It is recommended that CRM training programme be conducted for UAV operators for effective mission accomplishment with safe operations. It is also recommended that a HF specialist be involved in investigation of future UAV accidents, to bring out relevant HF issues and suggest remedial measures.
Keywords
Human factors
incidents
accidents
unmanned aerial vehicle
crew resource management

In the past few years of Unmanned Aerial Vehicle (UAV) operations in India, there have been several incidents and accidents. This is inspite of a sophisticated system, with ample redundancy and adequate fail-safe mechanisms in place to allow all-weather long duration missions. UAV operations are multi-crew missions requiring concerted interpersonal coordination of operators [1]. This is a team activity in an interdisciplinary work environment. The team includes a Mission Commander (MC), an External Pilot (EP), an Internal Pilot (IP) and an Observer and Payload Operator (OB). The UAV crew of MC, IP and EP consists of pilots from one of the three aviation streams, viz. fighter, transport and helicopter. The OB is from non-flying background.
For safe and successful multi-crew operations, the defined requirements are that no crew member has excessive workload, communication and decision making are effective, stress does not deteriorate performance and situational awareness is maintained [2]. But a breakdown in one or several of these factors may lead to an incident or an accident. There may not be a loss of human life; but definitely there is loss of face for the operating crew. Court of Inquiry (CoI) of the incident/accident may at times fail to analyze critically as to why an evolving situation was allowed to develop into an irretrievable incident/accident.
In this paper an analysis of CoI in various incidents and accidents in UAV operations in IAF has been undertaken. This analysis was aimed solely at the HF issues with focus on CRM issues, which could have been a causative or a contributory factor in the outcome of a situation leading to an incident or an accident. Certain recommendations, based on this paper are made to prevent similar accidents in future.
Material and Methods
Various CoI available at the UAV units and Flight Safety summary of UAV accidents were studied to analyse HF and CRM issues (Table 1). Since HF or Aviation Medicine (AM) Specialist are not associated with UAV related CoI, there are no methodical records of HF and CRM issues. Hence these factors were gleaned through from the findings of the Court or the available records.
| Case | Phase of Flying | Time of Warning | Time of Corrective Action | Sum of CRM Factors for Accident Analysis Spectrum* | Outcome |
|---|---|---|---|---|---|
| I | Cruise | 1 hr 13 min | Immediate | +7 | Safe |
| II | Take Off | On T/O roll | Delayed | -2 | Safe (minor damages) |
| III | Cruise | 2 hr 06 min | Delayed | -5 | Crash |
| IV | Cruise | 35 min | Immediate | +1 | Crash |
| V | Cruise | 30 min | Immediate | -6 | Crash (mid-air) |
Legend*:
+1 : Positive factor, meant to prevent an incidence or cope with emergency
0 : Non-significant or non-contributory factor
-1 : Contributory or causative factor adversely affecting the outcome
Each CoI is briefly presented as a case report for ease of understanding the situation. The emerging HF and CRM issues are analysed and discussed to understand their causative or contributory role. The same are presented in the form of a matrix to find an emerging pattern (Table 2). The factors as recorded and/or interpreted by the authors are: Individual factors viz. decision making, situational awareness, workload, stress and individual differences and Group factors viz. teamwork, communication, leadership, social influences and cultural differences [2]. Thus, there are ten broad factors to come to conclusive findings in order to pinpoint HF and CRM issues.
| Case | Individual Factors | Group Factors | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| DM* | SA** | Work- load | Stress | Individual Differences | Team work | Communication | Leadership | Social influences | Cultural differences | |
| I | +1 | +1 | +1 | +1 | 0 | +1 | +1 | +1 | 0 | 0 |
| II | +1 | -1 | -1 | 0 | -1 | +1 | -1 | 0 | 0 | -1 |
| III | -1 | -1 | +1 | 0 | 0 | -1 | -1 | -1 | -1 | 0 |
| IV | +1 | -1 | -1 | -1 | 0 | +1 | +1 | +1 | 0 | 0 |
| V | 0 | -1 | -1 | 0 | 0 | -1 | -1 | -1 | 0 | -1 |
*DM : Decision Making; ** SA: Situational Awareness
Development of the matrix was such that each CRM factor was considered whether it contributed or caused the incident/accident. Thus, each case report where each factor with a significant role in causation or as contributory was given -1 score, each non-significant or non-contributory factor was assessed as 0, each factor which was present but is a positive trait and was meant to prevent an incidence or cope with emergency was given +1 score. An algebraic summation for each case was done. This was then plotted on a -10 to +10 linear axis called as ‘Accident Analysis Spectrum’ (AAS) with suggested accident and safe zone (Fig 1).
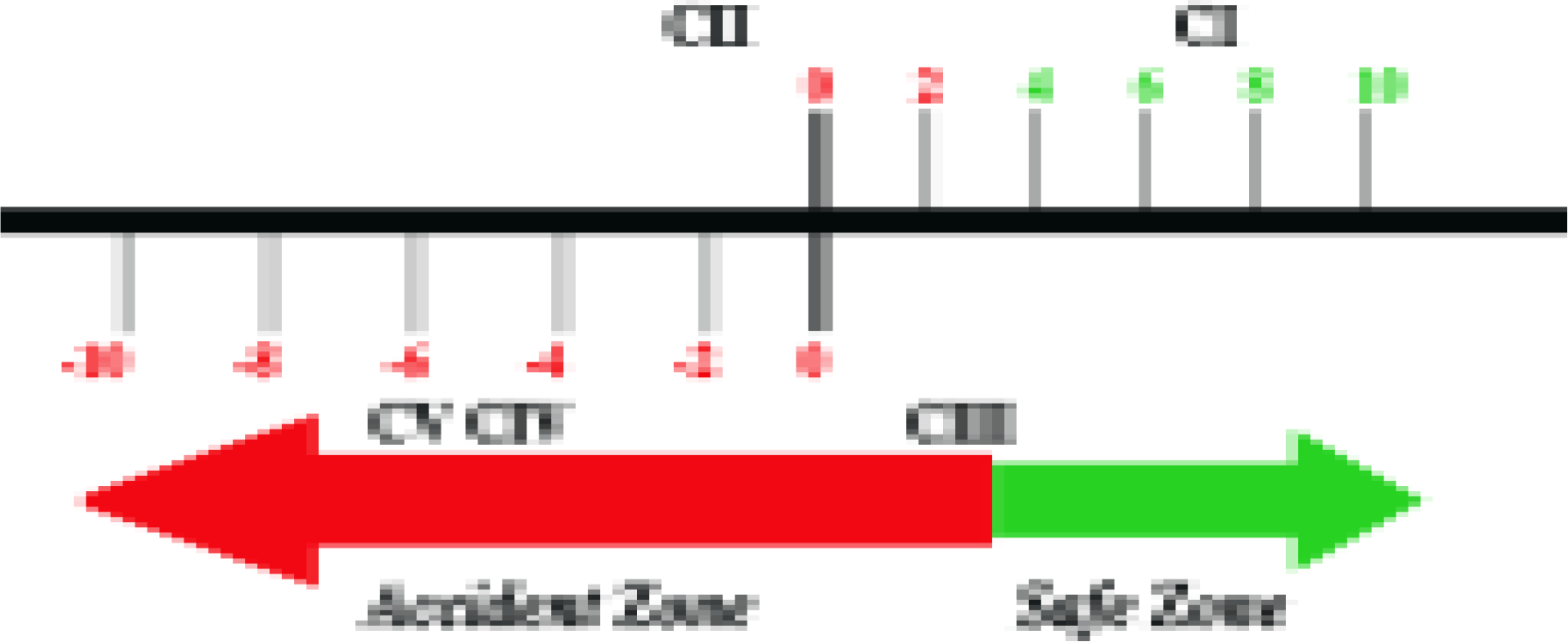
- Accident Analysis Spectrum for Human Factors & CRM Issues (Summation of factors of each cases are shown in bold black Roman numerals, with prefix C)
Results
The crew involved in analyzed incidents and accidents had varied level of experience of UAV operations. The average experience of MC was 116 hr (+ 83) of IP was 32 hr (+ 14) and of EP was 49 hr (+ 16).
Case I. During a routine training flight, UAV had its engine rpm stuck at maximum and it stopped responding to throttle and descend commands. The MC assessed the emergency, with IP constantly monitoring the flight parameters. The EP was responsible to land the UAV. The UAV made a safe dead stick landing under visual contact with a calculated engine cut at safe distance and altitude.
Case II. While on a take-off roll for a circuit and landing training sortie for EP, the UAV rolled towards left with right wing hitting a distance-to- go-marker (DTGM). The aircraft got airborne since it was at take-off speed. It landed back safely after a dummy circuit for damage assessment. EP was undergoing conversion training under supervision of the manufacturer’s instructor (? language barrier). While seeing the UAV drift to the left, the EP did not apply corrective right rudder and the instructor inspite of the accelerating aircraft on take-off roll, was giving verbal instructions rather than taking over the controls.
Case III. During a mission the IP observed a low fuel pressure warning indicator after about 2 hours and 50 minutes of flying. This is an act emergency, requiring immediate recovery of the UAV. Soon the fuel pressure dropped to zero, the engine stopped, and the UAV glided. An emergency landing was attempted, but with the lost transmission link, UAV crashlanded away from the base, with serious damages. The CoI analysis revealed that the first warning was recorded about 18 min after being airborne. This was repeated 95 times till about 2 hours 15 minutes after take off when it became steady. IP failed to monitor the engine parameters, including the steady low fuel pressure warning indicator for about 40 minutes. He was preoccupied with rest of the crew in handling a payload related problem.
Case IV. 35 minutes after take-off, there was Air Data Relay (ADR) fail warning and failed Radio Communication Control Processor (RCCP) communication with Digital Central Processing Assembly (DCPA). While making the recovery of the crippled aircraft, there was undershoot approach leading to UAV impacting the fine hook arrester system and sustaining damages. EP had to manage a visual landing, with no other available inputs.
CaseV. During a test flight by the manufacturer’s representative, there was a midair collision with a fighter aircraft over the base. UAV sustained beyond economical repair damages.
Table 1 shows the summary of the case reports. As it emerged, there were several HF and CRM issues responsible for the outcome of the situation. The CRM individual and group factors matrix is presented in Table 2. Fig 1 shows the AAS of the CRM issues. The outcome, except in Case I, was damaging to the machine as well as to the crew with glaring CRM factors (Fig 2).
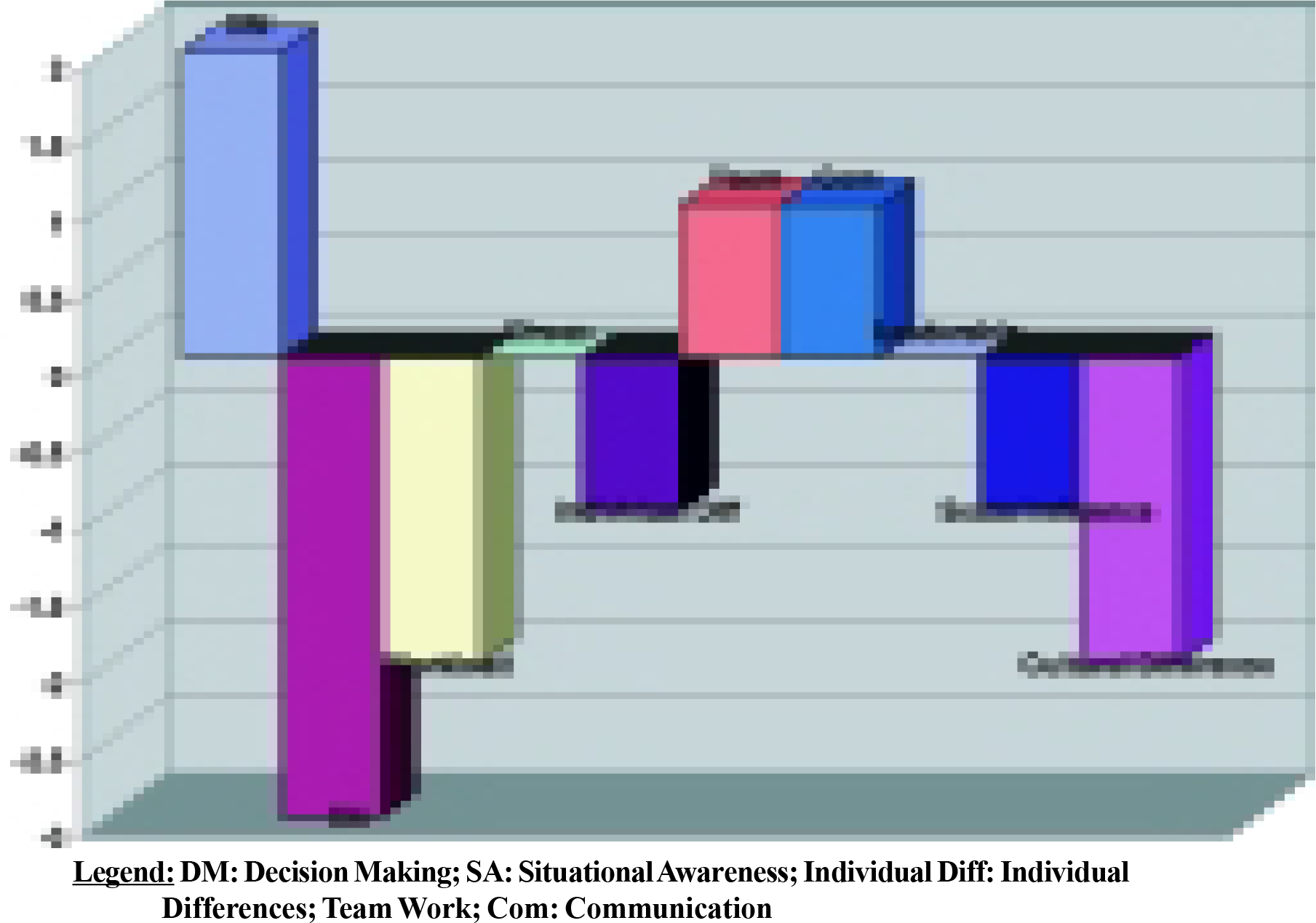
- Graphical Presentation of Summation of Individual CRM Factors
Discussion
An analysis of HF and CRM factors in a limited number of UAV incidents and accidents of UAV was undertaken to find out a pattern, if any. This was done with the sole purpose that an understanding of the human error (HE) and failures shall help expand the role of HF and CRM in the probable diagnosis of human failings. This may also help define preventive strategies for safe UAV operations. It is especially important since with a sophisticated system like UAV, errors and failures that occur become attributable to human inadequacy and fallibility. The attribution may be direct when the operator acts inappropriately, or indirect when human planners and system designers have inadvertently built into the system intrinsic sources of HE [3]. However, for the purpose of present analysis, discussion shall be limited to the operators only.
The CRM individual and group factors matrix (Table 2) and ‘Accident Analysis Spectrum’ of the CRM issues (Fig 1) were utilized to define a pattern or a trend in an incident/accident. Considering the small number of cases studied in the present study, it is not possible to comment on its scientific validity, even though trends can be observed. It appears that CRM matrix and AAS could be used for future analysis of similar incidents/accidents to make a database for statistical analysis.
Briefly, to highlight the role of UAV operators in an emergency, the MC is responsible for evaluating critical in-flight emergencies for safe and timely recovery of the crippled UAV. The IP is responsible for system supervision and critical decision making to recover the UAV in emergency conditions, till handing it over to EP. EP is responsible for effecting recovery of UAV under visual conditions [1]. The fourth member, the OB, does not have an active role during emergencies since he is responsible for payload operations, as per mission brief. Except the EP, the other crew operates from a universal Advanced Ground Control Station (AGCS). This has dynamic visual displays with quantitative, qualitative and check readings of the system, besides the representational display of basic flight parameters for safe navigation of the UAV [1]. The task primarily, is sustained attention or vigilance. There is a spectrum of high workload during surveillance or system malfunction and low workload when the UAV navigates and performs predetermined tasks [1]. Success of mission depends on crew members collaborating on a common goal, with minimal confusion and conflict [4].
The discussion hereafter is limited to the important HF and CRM issues that emerged and which define the outcome of a situation.
-
Decision Making.
The UAV operators, mostly trained aircrew, have undergone conventional methods of aviation training before being restreamed to UAVs. Transfer of previous learning may present conflicts in learning about advanced UAV and its performance. The system design allows each UAV sub-system with independent evaluation and DM for the best performance, including redundancy in case of failures. The operators have to tune themselves to such system performance. In an emergency though, there may be conflict between conventionally trained operators and an advanced design concept of UAV. This leads to the operator flying the ‘thinking’ UAV, conflicting with the software evolved logic of the machine, where in the worst case scenario he manoeuvres the machine to fly out of control. This happens because of conflicts in critical decision making – a classical HE.
Another aspect which may influence DM is that success in a mission is not evaluated by the operators. Instead the evaluating criterion for mission success is whether the mission objective was fulfilled, as desired by the agency that tasked the operators in the first place. Hence the MC or the crew may press-on, despite system warnings. The false sense of security is primarily due to high automation and system redundancy. The machine may be compromised for the sake of mission accomplishment. This aspect can not be scientifically proved, but operators vouch for it. Interestingly, most of them succeed most of the time but sometimes there are poor decisions and lost machines (Table 1).
Situational Awareness. UAV operation is a sustained vigilance task. IP is most susceptible to inadequacies in his SA. He flies the UAV through pre-programmed functions, thus losing awareness about real aircraft. The situation is further confounded by iconic displays of the aircraft state and position and limited perception of the real machine through the video display. Once the UAV is flying as per pre-programmed flight plan, he may lapse into varied concentration cycles. There are periods of high concentration followed by phases of low concentration. During the phases of low concentration a changed parameter or an odd warning may not register as quickly. This may lead to delayed reaction, or worst still, there are times when such warnings may be discarded as spurious or not considered harmful for the system performance. Repeat warnings may be ignored for considerable period of time, when the once dynamic situation becomes stable, allowing increased errors of perception and judgement to creep in. This is because an event of repeated visual warnings, which may initially alarm, is perceived as normal indication on the display not affecting the flight performance. This partial loss of situational awareness may affect DM. In a worst case scenario, lost SA allows no decision to be made till the machine is jeopardized.
Workload. The collective response of the crew during an emergency is determined by operators’ skill, experience and adaptive strategies such as minimizing time spent on trivial tasks and focusing on vital matters [4]. However major source of high workload is pressure of time or rather the paucity of it. It is especially true with multiple tasks required to be accomplished in a fixed duration of time [4]. It becomes more critical in an emergency, where other HF issues, including psychological ones, heighten the stress of high workload.
Stress. The design concept and the technological advances of the UAV system make it near impossible to put the aircraft in danger in a planned manner. Each system and sub-system of UAV allows the operator great latitudes of error and yet the system performs. This may at times manifest in the operator feeling redundant with poor self- image in comparison with such a fail- safe machine. Hence any adverse situation, say a system warning, makes the operator attempt to lord over the system, rather than nurture it. This heightens the situational stress, resulting in conflict between learning and decisions made in actual adverse situations. Here accidents are caused by stress affecting the human and his acts of omissions or commissions as per his stress coping strategies, rather than the system failure.
Teamwork. The outcome of an emergency in the multi-crew environment depends on harmonious environment or avoidance of conflicts. The MC plays a vital role in ensuring the minimal conflict environment. During operations, the MC gives the executive command for the task achievement to the IP. This may, at times, allow for chances of conflict between IP and MC as to the interpretation of the command. In other situations, there is conflict of roles for IP flying with an authoritarian MC who insists on literally, flying the mission. This leaves the IP becoming a co-pilot instead of flying, under the command of MC who pilots the UAV. Interestingly, the OB does not have an active role during emergencies since he is responsible for payload operations, as per the mission brief. However, he is the sole impartial member, who in case of crew conflict, may act as the balancing factor. During inquiries as well, the OB may contribute with his unbiased disposition, to help find the breakdown or failure of crew coordination or reactions.
Communication. Breakdown in communications may precipitate conflicts or result in failure to resolve the emerging conflicts. This may not be a cause of an accident, but may always be contributory. Communication is also vital for MC, since he is the nodal point of interaction with outside agencies, including Air Traffic Services (ATS). Failure of communication between MC and ATS could have been a contributory cause of the sole case of mid-air collision. On the other hand, positive communication is vital for team building and nurturing the same. The leadership plays an important role in evolving teams with positive communication for safe mission accomplishment.
Leadership. There are conflicts of roles of leaders as part of the crew or the rigid hierarchy of a military unit. The IP may also be commanding the UAV unit and hence attempt to steal the role of MC. Thus the Commanders may usurp the responsibilities of other crew members or worst still, may dictate the task to others. Depending on the reaction of other operators, submissive or retaliatory, the operating environment is compromised. In an emergency, this may lead to breakdown of the team, with obvious catastrophic results, as was evident in case 2, where MC and IP were so involved with the payload glitch that they did not perform their assigned tasks.
Cultural Differences. Two of the reported cases occurred with the manufacturer’s representatives being part of the operations. The cultural differences may be one of the contributory factors. Once IAF operators solely operate the UAV, such factors hopefully would be redundant.
CRM. The success or failure of a team depends on well-laid down rules for the activity. These include the basic issues of communication, situational awareness problem solving, decision making, judgement, leadership-followership, stress management, critique and interpersonal skills [5,6]. CRM focuses on the necessity for highly trained individuals to work together as a team, without undermining the traditional pilot skills and airmanship. The objective of CRM is to maintain task attention, situational awareness and to enhance safe and efficient operation of aircraft for mission accomplishment. Formal CRM training has helped evolve better integrated teams for optimal task achievement. It is prudent to plan CRM training for UAV operators as well. The sole aim of the training shall be to resolve the inherent problems of integrating a collection of technically proficient individuals into an effective team for all situations [7]. The goal of CRM programme for UAV operators would be increased safety, enhanced effectiveness and improved efficiency of operations.
The emerging HF and CRM issues of the analysed incidents and accidents lead the authors to believe that there is likely scope of improving flight safety with regards to UAV operations. There is a need to study every future incident and accident with a detailed HF analysis. It is recommended that the local AM specialist be a co-opted member of CoI for the same.
In order to get a better picture of crew interaction, especially during a crisis, besides assisting in HF analysis, it is recommended that communications during each sortie be recorded. This shall help understand the communication dynamics amongst the crew and help taking corrective measures.
There is also a need for audit of HF during UAV operations. This may be done in the form of field studies or by undertaking an in-depth HF analysis of actual operational sorties. This must also include any operator perceived or reported HF issues.
There is a need to develop dedicated CRM training programme for UAV operators. The help of HF specialists, especially CRM programme developers from amongst commercial aviation agencies may be sought initially, till in-house CRM programmes evolve and are validated.
References
- Human Factors in Unmanned Aerial Vehicle operations in India: A Preliminary Report. Paper presented at 50th International Congress of Aviation and Space Medicine.
- Crew Resource Management. In: Ernsting JE, King PF, eds. Aviation Medicine (3rd ed). London: Butterworths; 2000. p. :608-19.
- [Google Scholar]
- Workload, Situational awareness and teaming issues for UAV/UCAV operations. In: Proceedings of the 45th Human Factors and Ergonomics Society Annual Meeting. 2001. p. :162-65.
- [Google Scholar]
- Training and research for team work in military In: Weiner EL, Kanki BG, Helmreich RL, eds. Cockpit Resource Management. San Diego: Academic Press; 1993. p. :337-66.
- [Google Scholar]
- Communication and crew resource management In: Weiner EL, Kanki BG, Helmreich RL, eds. Cockpit Resource Management. San Diego: Academic Press; 1993. p. :99-136.
- [Google Scholar]
- Critical issues for CRM training and research In: Weiner EL, Kanki BG, Helmreich RL, eds. Cockpit Resource Management. San Diego: Academic Press; 1993. p. :315-36.
- [Google Scholar]




